Form Finding Gridshell
Uploaded by
XudndixbdForm Finding Gridshell
Uploaded by
XudndixbdJOURNAL OF THE INTERNATIONAL ASSOCIATION FOR SHELL AND SPATIAL STRUCTURES: IASS
FORM-FINDING OF A GRID SHELL IN COMPOSITE MATERIALS
C. DOUTHE, O. BAVEREL, J.-F. CARON
Institut Navier -- LAMI, Ecole Nationale des Ponts et Chaussées
6 et 8, avenue Blaise Pascal - Champs-sur-Marne - F-77455 Marne-la-vallée cedex 2
[email protected], [email protected], [email protected]
Editor’s Note: Manuscript submitted 19 September 2005; revision received 3 March 2006; accepted for publication
5 March 2006. This paper is open for written discussion, which should be submitted to the IASS Secretariat no later than
December 2006.
SUMMARY
The advantages of the use of glass fiber composites for grid shell are presented. The shape of grid shells results
from a post-buckling state of tubes. To bypass the difficulty to predict the geometry of the final equilibrium state,
the large rotations which occur during the erection process are modelled using the dynamic relaxation
algorithm. This paper proposes an adaptation of this method for structures prestressed by bending through the
development of a computer program. It includes the validation of this numerical tool through comparisons with
a finite elements software. Then an application to the form-finding of a grid shell and the study of its stability
under standard loading conditions will be presented. Finally the authors conclude on the technical and
economic feasibility of this composite grid shell.
Keywords: Composite material, Dynamic relaxation, Grid shell, form-finding, non-linear analysis.
1. INTRODUCTION framework of a research on structures for shelters
for temporary or permanent purposes [3]. Its
In the last twenty years many applications of
structural analysis was first presented in CCC2005
composite materials in the construction industry
[4] and will be detailed in this paper. Four design
were made. The main field of application concerns
principles guided the conception stage of this
the reinforcement of concrete beams with carbon
experimental grid shell:
fiber plates [1] or post tension cables. But more
recently, a footbridge with carbon fiber stay-cable - Optimal use of the mechanical
was build in Laroin (France, 2002), another characteristics of the fibers;
footbridge, all made of glass fiber composite, was - Simple connection between components of
build in Aberfeldy (Scotland, 1993) and a movable the structure;
bridge (the Bonds Mill lift bridge in Stonehouse, - Optimal design according to its use;
England, 1995). Nevertheless applications using - Cheap material cost toward use of
composite materials as structural elements remain components already available in the
exceptional in comparison with concrete, steel or industry.
even wood. Although the qualities of their
mechanicals properties are obvious (low density, 2. GRID SHELLS
high strength and high resistance against corrosion 2.1. Definition of grid shells
and fatigue), their relatively low elastic modulus
make their use in usual buildings more expensive The name of grid shell commonly describes a
than other traditional materials. In order to take structure with the shape and strength of a double-
advantages on every characteristic of composite curvature shell, but made of a grid instead of a solid
materials, new structural concepts must be found. surface. These structures can cross large span with
very few material. They can be made of any kind of
The LAMI-ENPC is therefore developing a project material - steel, aluminium, wood or even
of innovating footbridge [2] and an experimental cardboard tubes… Generally, the metallic structures
grid shell. This last project takes place in the are made of short straight elements defining a facet
VOL. 47 (2006) n. 150
geometry. The complexity of this geometry requires Moreover with standard diameters of tubes,
the development of many clever and expensive standard swivel scaffolding elements (see figure 1)
assemblies. To mitigate this disadvantage, a very already available in the industry could be used for
specific erection process was developed that uses the realization of the connection between the tubes.
the ability of slender components to be bent. Long Hereby the material cost can be once again very
continuous bars are assembled on the ground, effective. This is why these technical solutions
pinned between them in order to confer on the grid seems to be appropriate for the construction of grid
a total absence of plane shear rigidity which will shells, and could contribute to the development of
allow large deformations. The grid is deformed this type of structures.
elastically by bending until the desired form is
obtained and then rigidified. Three grid shells were
built in the world using this method: the Mannheim
Budesgartenshau (Frei Otto, 1975), the Weald and
Downland Museum (E. Cullinan, Happold, 2002)
[5] and the Japanese pavilion for the Hanover 2000
Exhibition (Shigeru Ban, Happold). The structure of
the first two grid shells is made of wooden bars,
while that of the third one uses cardboard tubes,
locally reinforced with wooden arches.
Figure 1: Standard swivel scaffolding elements
2.2. The choice of the material
2.3. The existing form-finding methods
In this process of assembly, initial bending strains
are induced in the element of the lattice structure. In In grid shells structure, the elastic strain of the
the existing grid shells, wood was chosen because phase of assembly imposes large displacements on
of its low density and high limit strain (about 2%) the beams and induces thereafter a state of bending
but not for its strength (30 MPa at best). Glass fiber prestress. The search for stable and aesthetic forms
reinforced polymer (GFRP) exhibits a strength of (the so called form-finding step), the evaluation of
about 350 MPa and a limit strain of about 1.5% for strains and the optimization of their distribution in
only 1.9 kg/m3. Glass fiber reinforced polymers the various elements require taking into account
have therefore much higher rigidities (from 20 GPa those large displacements and being able to model
to 40 GPa) than wood (around 10 GPa), so that, for strong non-linearity.
a given geometry of grid shell, the buckling load of
a composite grid shell will be higher than for a The grid shell of Mannheim of 1975 was conceived
wooden grid shell. These mechanical properties by inversion of a cable net subjected to its own
make thus the use of GFRP very attractive for this weight as shown in [6] and by work on equivalent
kind of application. small scale models. This method was only a first
approach of the form of grid shells because the
As the stresses in the beams are almost exclusively reverse hanging method leads to simple
axial stresses, fibers are required only in the main compression stresses whereas, in grid shell, the
direction of the beam. Therefore the industrial initial state of stresses combines bending,
process of pultrusion would provide a cost-effective compressive and tensile stresses.
method for the production of unidirectional
composite materials. It will also allow the Today, the power of computer has considerably
production of very long tubes that would avoid the increased and the calculation can be carried out
problem of joining the wood cleats. To improve the using finite element methods. However, usual
performance of the section of the tube, one could algorithms (Newton-Raphson for instance) quickly
also choose a circular pull-winded tube with fiber present significant computing times and problems
perpendicular to the axis of the tube. It will raise the of convergence due to the high level of rotation and
limit strength and avoid the ovalization of the displacement. These difficulties of the modeling of
section, but it will also raise the cost of the material a form-finding step not only concern grid shells, but
production of about 15% in comparison with the also a various type of structures among which
pultrusion process. tensile structures. For this type of structures, two
JOURNAL OF THE INTERNATIONAL ASSOCIATION FOR SHELL AND SPATIAL STRUCTURES: IASS
specific methods were developed and are today to oscillate to the next maximum of kinetic energy
widely used in Europe: firstly the force density where, like previously, speeds are given to zero.
method [7] and its extension to a continuous And so on, until the kinetic energy of all the modes
geometry, the surface stress density method [8] and of vibrations is dissipated.
secondly the dynamic relaxation method. This
method is the only one that was extended to the 3.2. Modeling the movement of the structure
form-finding of grid shell and will be thus
developed below. The initial grid is made of long continuous beams.
They are set up in two principal directions with a
3. THE DYNAMIC RELAXATION METHOD regular spacing between them. These beams follow
an Euler-Bernoulli model and their behavior is
3.1. History linear elastic. The beams in one direction are pinned
with the beams in the other direction of the grid so
The dynamic relaxation method was developed by that there are no bending stresses induced by the
A. S. Day studying marine streams. In this original connection. No external bending moment is applied.
technical solution, static equilibrium is regarded as The beams are thus subjected only to shear and
the limit equilibrium condition of strongly damped normal forces. One can then show by considerations
vibrations. The first application to tensile structures of structural mechanics, that there is no torsion in
and hanged roofs was carried out by Day [9]. Then initially straight beam under such a load if its
came the works of M.R. Barnes on form-finding principal inertias are equals [12]. Each beam is thus
and his first applications to prestressed cable nets modeled like a tube of Young modulus E, inertia I
[10], to membranes and inflatable structures [11], and section S. Each node of a beam has three
and to structures with bending rigidity and to grid translational degrees of freedom so that the position
shells [12]. One can also easily find other examples of node i will be noted by the vector Xi.
of complex structures calculated by dynamic
relaxation like cable-domes [13]. Today this The calculations start from an arbitrary geometry.
method has been applied to many fields of In this initial state, the system is unstable and will
mechanics, such as for example a study on metallic move under the actions of the internal stresses and
foams performed in the ENPC and the Navier external loads. The internal stresses in the current
Institute [14]. geometry are computed using the stress free state of
the structure. To describe the movement, the
“The basis of the method is to trace step-by-step for position of every node is calculated for each time-
small time increments, the motion of each node of a step ∆t until balance.
structure until, due to artificial damping, the
structure comes to rest in a static equilibrium.” [11]. First consider that the position Xit of every node i at
In the original version of the DR method, a time t is known and that their speed Vit-∆t/2 at time t-
parameter of viscous damping proportional to the ∆t/2 is known too. The acceleration γit at node i and
speed and the mass of the nodes was used. But to time t is given by the second law of Newton (1)
ensure the convergence of the process, it was from the resultant Rit of all forces applied to node i
necessary to introduce controls and adjustments on and from its mass mi.
those various parameters [15]. This method remains R i = mi ⋅ γ i
t t
(1)
relatively delicate to implement, so that an
alternative procedure of kinetic damping will be
preferred in this paper. Kinetic damping is an To go up to the speed Vit+∆t/2 of node i at time
artificial damping whose principle relies on the t+∆t/2, a centered approximation scheme is uses for
exchange during the movement, for a conservative the acceleration, so that one can deduce the
system, between kinetic energy and potential elastic expression of the speed according to (2).
energy which one seeks the minimum. In this t + ∆t 2 t − ∆t 2 ∆t t
procedure, the oscillations of the structure start Vi =V i + ⋅ Ri (2)
from an arbitrary geometry and are free until a
mi
maximum of kinetic energy is reached. The
structure is then stopped: all speeds are given Using again a centered approximation, one obtains
artificially to zero. Then the structure is again free (3) the position Xit+∆t of node i at time t+∆t:
VOL. 47 (2006) n. 150
t + ∆t
Xi
t
= X i + ∆t ⋅ V i
t + ∆t 2
(3) One can then deduce the deformation εti,j from the
length of the beam L0i,j in the stress-free geometry,
From the new positions Xjt+∆t of all the nodes j its length Lti,j at time t and the position Xi+1 and Xi-1
connected to node i, one can then calculate the of the two adjacent nodes. Their expression is given
internal forces Fiint at node i and time t+∆t, add to in (6), where Xti,j denotes the relative position Xj-Xi
them the external load Piext and so define the and Li,j its norm.
resultant Rit+∆t (4) of the forces applied to node i at
time t+∆t. 1 1 t
T i , j = ES ⋅ 0 − t ⋅ X i , j
t
(6)
L
R
t + ∆t
i =P
ext
i + ∑ F (X
int
i, j
t + ∆t
i ,X
t + ∆t
j ) (4) i , j Li , j
j
For the calculation of cable elements, one can easily
At the boundary, the displacements are constrained, introduce non linearity by not tacking into account
but not the rotations. The compatibility of the the force in the cable if it is subjected to
movement with the boundary conditions is ensured compression.
at each step during the calculation of speeds, by
setting certain components to zero. This verification Bending stresses
was chosen because it allows computing directly
the kinetic energy on compatible speeds. For the calculation of bending stresses, let us first
make the assumption that three successive nodes of
a beam are always sufficiently close so that one can
3.3. Internal forces
suppose that they are on a circle of radius ρit (see
Internal forces in a beam are of two natures: figure 3).
traction-compression and bending. The modeling
presented hereafter adopts that proposed by M. R.
Mi
Barnes [11], extends it to a three dimensional i αi Fi,i+1
problem and to a more sophisticated modeling of Fi-1,i
connection between the elements. i-1 Fi,i+1 Fi-1,i
Li-1,i Li-1,i+1 Li,i+1 i+1
Axial stresses
Figure 3: Scheme of bending stresses
Let us first consider the diagram of figure 2 of a
portion of an arch constituted of three nodes (i-1, i This radius will be regarded as the radius of
and i+1). curvature at node i and time t. It can be calculated
from the positions of the three nodes (7), where
sin αti is given by (8):
i
ESi-1,i ESi,i+1
-Ti-1,i Ti,i+1 Lti −1,i +1
i-1 Li-1,i Li,i+1 ρ = t
i (7)
Ti-1,i i+1 2 ⋅ sin αit
-Ti,i+1
t t
Figure 2: Scheme of the axial stresses
X i −1,i ∧ X i ,i +1
with sin αit = (8)
Lti −1,i ⋅ Lti ,i +1
At each current node i of a beam, there are two
forces of compression-traction Tti-1,I and Tti,i+1
Then, from the mechanics of materials, one deduces
related to the two connected elementary beams. At
the bending moment Mit at node i and at time t (9):
time t, these forces are calculated for each
elementary beam according to its stiffness ESi,j
EI i
(where j stands for i-1 or i+1), and to the axial M it = (9)
strain of the centroid of the beam εti,j (5). ρit
Ti ,t j = ES i , j ⋅ ε it, j (5) The direction of the bending moment is
perpendicular to the local plane of curvature that is
JOURNAL OF THE INTERNATIONAL ASSOCIATION FOR SHELL AND SPATIAL STRUCTURES: IASS
given by the cross product Xti-1,i x Xti,i+1 so that the thickness that induces an eccentricity between those
final expression of the bending moment Mti is (10). nodes. If these eccentricities act as geometrical
imperfections, one can expect a great loose of
t t
2 ⋅ EI X i −1,i ∧ X i ,i +1
t
resistance of the structure. However in these first
M = t i ⋅ t
i (10) calculations, the eccentricities between the axes of
Li −1,i +1 Li −1,i ⋅ Lti ,i +1 the beams will be neglected and it will be assumed
that the connected nodes have the same spatial
For more convenience, this bending moment Mti position. Then, according to the method exposed
will be transformed into equivalent forces applied higher, one calculates the internal forces associated
to the nodes. Therefore let us consider the right- to the current geometry for each beam separately. It
hand side of the beam. If the reaction Fti-1,i at node is considered that the total force applied to each
i-1 is assumed to be perpendicular to Xti-1,i, one can node is the sum of the internal forces of each node.
deduce from the balance of the forces due to the Initially at the same spatial position, the nodes of
moment Mit the value of Fti-1,i (11). the various beams are subjected to identical forces
at every time, they thus remain at the same spatial
t t
t X i −1,i ∧ M i position.
F i −1,i = 2
(11)
Lti −1,i 3.5. Stability and convergence
In the same way, the balance of the left hand-side To accelerate the speed of convergence, so that the
gives Fti,i+1 (12). system evolves faster to its position of equilibrium,
one can increase the time step or decrease the nodal
t t
t X i ,i +1 ∧ M i fictitious masses. Nevertheless, when the time step
F i ,i +1 = 2
(12) exceeds a certain breaking value or the fictitious
Lti ,i +1 nodal masses become too low, numerical
instabilities appear. The phenomenon is explained
And so the moment Mit at node i is broken up into a simply in [10]. The generalization of the problem to
set of four forces directly connected to the current a system of beams, at every moment requires the
geometry of the beam. Two are applied to node i, knowing of the total stiffness corresponding to the
one to node i+1 and one to node i-1. various efforts being applied to the node. For a
current beam, the ratio EI/ES is about 1/100 so that,
If the structure studied is a plane structure that is in a first approach, the bending stiffness can be
loaded in its plane, beams with initial curvature can neglected in comparison to the tension stiffness.
be modelised by taking it into account in the Thus, at the beginning of the calculation of a peak,
expression (9) of the bending moment. But if the the fictitious masses mti are fixed according to the
problem is not plane, the introduction of beams that total axial stiffness of the beams connected to the
are not initially straight will invalidate the node i and can be written as (13):
assumption that no torsion appears. It will be then
necessary to introduce a rotational degree of
∆t 2 ES T peak
freedom at every node. An advantage of this m i
peak
=λ⋅ ⋅ ∑ 0 + 0 (13)
modification will be that it would allow the 2 j L L i, j
modeling of beams with different inertia in the two
principal directions. It would also make the In this expression, λ is a parameter slightly higher
algorithm more versatile for the study of prestressed than 1 that insures the stability of the algorithm and
structures in large displacements and rotations an acceptable time of convergence. (ES/L)i,j
taking into account the lateral torsional buckling. represents the axial elastic stiffness and (T/L)ti,j the
geometric stiffness of each elementary beam. Tti,j is
3.4. Efforts at connection points the current tension in the beam which is calculated
according to the axial elastic stiffness and the
At connection points, there is an interaction current strain of the element at time t. To accelerate
between beams. To model this interaction, one convergence, the fictitious masses are reset at every
defines separately, at any connection point, a node energy peak according to the current geometric
on each beam. The connection element has a stiffness.
VOL. 47 (2006) n. 150
4. VALIDATION OF THE PROGRAM the FEM, the reference values are the results of the
beam divided in 100 elements and that for the DR,
The dynamic relaxation algorithm of section 3 was
the number of elements of the beams vary from 10
implemented in a free scientific software package
to 100. The whole results are presented in table 1.
named Scilab™ [16], developed in common by the
The maximal displacements Ux and Uz are in cm,
ENPC (Ecole Nationale des Ponts et Chaussées)
the normal forces in N and the maximal bending
and the INRIA (Institut National de Recherche en
moment Mmax in N.m.
Informatique et Automatique). The 2D-validation
comprises several tests:
Nb of Uxmax Uzmax Nmin Nmax Mmax
Model
- checking of the stability of the algorithm; elem. (cm) (cm) (N) (N) (Nm)
- convergence of the results and influence of 10 3,566 8,614 -968 728 3 460
the number of elements; 20 3,552 8,421 -968 947 3 451
- comparison of the results with those 30 3,52 8,409 -969 974 3 451
obtained with the finite element method DR
40 3,512 8,40 -969 979 3 447
using Abaqus™.
50 3,513 8,394 -969 992 3 445
4.1. 2D-Validation 100 3,513 8,384 -969 999 3 440
FEM 100 3,512 8,38 -969 999 3 441
The “elastica” (the post-buckled curve of a pin- theory Cont. 3,46 8.42 3460
ended beam) provides a useful comparison because
there is an analytical expression of the deformed Table 1: Results comparison (2D)
shape of the beam (Euler 1744). The numerical test
Table 1 shows that the results of the model are very
example is a tubular straight beam of 12 m length,
close from those obtained with the finite element
50 mm diameter and 2 mm thickness with a Young
method (less than 1‰ error). The differences that
modulus of 35 GPa. The beam, supported on end
remain between the analytical continuous model
rollers and restrained to lie in the plane xz, is
and the two others are due to the fact that the
subjected to opposite end axial loads of 1000 N that
numerical models take into account the strain
will cause the looping of the beam (see figure 4).
energy related to normal forces and not only to the
bending moment. The table shows also that the DR-
model provides accurate enough results (less than
3% error) with only 20 elements.
DR FEM
Nb of Time Nb of Time Nb of
element (sec) iter. (sec) iter.
10 28 3374 36 57
Z
20 112 7580 35 58
X 30 256 12084 35 59
Figure 4: Buckled beam 40 442 15409 36 62
50 681 19779 37 66
For the dynamic relaxation algorithm, the Euler-
100 3502 50592 41 70
Bernouilli model of section 3 is implemented. For
the finite elements method (FEM), an elastic Table 2: Computing time comparison (2D)
Timoshenko’s model of beam with 6 degrees of
freedom per node was chosen. The geometrical On this elementary problem, the comparison of the
non-linearity solver implemented is the Newton- computing times between the two methods (see
Raphson method. table 2) shows that dynamic relaxation requires
much more time than the finite element method.
The first aim of this validation is to compare the Actually for the dynamic relaxation, the buckling
results for the dynamic relaxation (DR) model and movement is very long to initiate as it can be seen
the FEM. The second aim is to test the influence of on the history of the kinetic energy in figure 5. To
the discretization for the DR model. Note that for improve the computing times, it is necessary to
JOURNAL OF THE INTERNATIONAL ASSOCIATION FOR SHELL AND SPATIAL STRUCTURES: IASS
choose an initial geometry that is not too far away The convergence of the DR algorithm was tested by
from the equilibrium geometry. In this particular changing the number of elements of the each beam
case a parabola of about 3.5 m height and 12 m from 6 to 60. During the tests, the maximum
length provides much better computing times (4562 displacements were measured in every direction
iterations in 108 seconds) for the same precision. (Ux and Uz; as the problem is symmetrical, Ux =
Uy) and the maximum reactions Rz. Results are
presented below in table 3. Once again the results of
KE in J
the dynamic relaxation model are very close from
those obtained with the finite element method (less
than 1% error). Like previously, it is remarkable
that this accuracy can be obtained with very few
elements (24 elements).
Nb of Uxmax Uzmax Rzmax
Model
elem. (in m) (in m) (in N)
6 1,42 3,41 434
time in s
12 1,37 3,33 450
DR
Figure5: History of the kinetic energy 24 1,35 3,3 458
60 1,34 3,29 458
4.2. 3D-Validation FEM 60 1,36 3,31 459
The 3D validation is based on a square grid of Table 3: Results comparison (3D)
beams, five in each direction x and y (see figure 6).
The beams are the same as for the 2D-validation: Looking now to the results of table 4, the
tubular straight beams of 12 m length, 50 mm conclusion of the comparison of the computing time
diameter and 2 mm thickness with a Young between the two methods is not as obvious as in the
modulus of 35 GPa. The distance between two two dimensional case. Actually for 60 elements the
successive beams is 2 m. The beams are supported finite element method still converges faster than the
on end rollers and loaded upwards at every dynamic relaxation. But one can observed that the
connection point with 200 N. At connection point, FEM had great difficulties to converge for a smaller
the rotations between the beams are free. number of elements, where the DR-model still has
quick convergence.
Z DR FEM
Nb of Time Nb of Time Nb of
elements (sec) iter. (sec) iter.
X 6 61 1086 >3.105 >106
Y
12 345 3840 >2,5.105 8,5.105
24 938 5520 >1,5.105 7.105
60 7572 18392 188 287
Table 4: Computing time comparison (3D)
Figure 6: Post-buckled grid
In the same way, if the loading is doubled to 400 N
per node (in the 24 elements per beam model), the
As for the 2D-validation, the Euler-Bernouilli computing time of the FEM goes over 40 hours
model of section 3 is implemented for the dynamic where the computing time of the DR remains quite
relaxation algorithm. And for the finite element equal to that obtain for 200 N per node (3968
model, an elastic Timoshenko’s beam element with iterations in 674 seconds). Thus, it can be
6 degrees of freedom per node was chosen and the concluded that the DR provides accurate results and
geometrical non-linear solver is again the Newton- is much less sensitive than the common Newton-
Raphson method. Raphson Method used for the FEM.
VOL. 47 (2006) n. 150
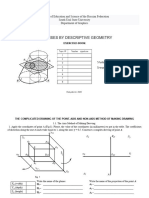
To complete this study, the geometry of this grid The characteristics of the grid shell in its final form
shell was compared to the geometry of a hanging are presented below:
net with the same initial pattern submitted to its
own weight. The geometric characteristics of the Height: 5.80 m;
cables are the same as that of the bars. The Width: 13.0 m;
boundary conditions of the hanging net are those of Length: 13.5 m;
the results of the form-finding step of the associated
grid shell. It is found that the average gap between Total length of beam: 670 m;
the two configurations is of about 70 mm with a Total length of cables: 900 m;
standard deviation of 115 mm. The maximum error Number of connections: 463;
made on the vertical position of a node is about 6%.
So, if one considers that the errors on the positions Livable surface (h>1.8m): 72 m²;
of the nodes have very important consequences on Surface of the envelope: 225 m²;
the conception of the cladding, the effect of the
Weight of the structure: 8.5 kg/m²;
bending rigidity shall not be neglected for the
Ratio thickness/Span: 1/270.
calculations of grid shells.
These last two characteristics have to be compared
5. STUDY OF A GRID SHELL with standard steel shed which structural weight is
about 20 kg/m2 and which ratio thickness per span
5.1. Description of the structure
relies by 1/25. Grid shell are thus very light and
The grid shell presented here in figure 7 is made extremely thin structures. Therefore their behavior
from an orthogonal grid of circular hollow beams of under external loads has to be investigated.
50 mm diameter and 2 mm thick. The space
between two consequent beams is about 0.75 m. In
the initial state the perimeter of the grid is made of
two semi-circles of radius 7 m separated by a
rectangle of 14 m length and 6 m width (figure 7).
Figure 8: Final shape of the grid shell
Figure 7: Initial state of the grid
The grid is then deformed elastically. It is pushed 5.2. Test under climatic action
upwards at every connecting node and submitted to
horizontal forces all around the boundaries in the The grid shell was tested numerically when it is
initial plane of the grid. These actions provoke a subjected to snow and wind load. The calculations
global buckling of the grid and a shortening of the were done with the DR program that performed
length of the grid shell. Once an aesthetic form is here the non-linear analysis of the structure and
reached, the extremities of the beams are fixed to predicts its instability. The values of climatic
the ground with free rotations. The final form of the actions are taken from the Eurocode 1. The grid
grid shell is in equilibrium with prestresses due to shell is virtually located next to the ENPC in Paris,
the bending in the beams and the actions of so that the wind pressure will be taken equal to 780
supports. The form-finding of the structure is yet to Pa and the reference snow load to 36 kg/m². To
the end, the grid shell can be stabilized (figure 8) compute the different pressure coefficients, it is
with, in our example, steel cables of 5 mm diameter assumed that the geometry of the grid shell is
in order to give it a shell like behaviour. closed to that of a spherical dome.
JOURNAL OF THE INTERNATIONAL ASSOCIATION FOR SHELL AND SPATIAL STRUCTURES: IASS
Several directions of wind were tested in order to for every load increment with SLS load as
choose the direction that implies the largest reference. One can observe that buckling appears
deflection of the grid shell. The worst condition is for higher loads than that of the ULS. One can thus
an angle of 45° with principal directions of the grid. conclude that this structure is safe. It is remarkable
A service limit state (SLS) combination of actions that, before buckling, the displacement and stresses
is calculated with the chosen wind load and the variations are proportional to the load increment.
associated anti-symmetric distribution of snow. The behaviour is thus linear elastic in a quite large
range of loading. Moreover the increase in stresses
In some primary tests the importance of the cables in the beams is relatively low compared to the
stiffness was observed. With the chosen diameter of initial stresses (less than 15%).
the cables, the deformations of the grid shell are
acceptable (<2.6 cm), less than the 200th of the
6. CONCLUSIONS AND FURTHER WORK
height. But a lost of the half of the stiffness of the
cables generates a lost of 70 % of the grid shell In order to develop new fields of applications for
rigidity. Without cables the stiffness of the grid composites in construction, proposals were made
shell is 10 times lower than with the 5 mm cables. for a composite grid shell. The process of assembly
of this type of structure was detailed. As the
25,00 complexity of the modeling of the erection process
Maximal displacement in cm
required specific computer programs, the dynamic
20,00
relaxation algorithm was presented and applied to
15,00 flexible beams and grid shells. The quality and
10,00
robustness of DR was shown through several
examples for the form-finding and the structural
5,00
analysis.
0,00
0 0,5 1 1,5 2 2,5 3 The last example demonstrated the feasibility of a
Load Increment / SLS Load
composite grid shell. Standard glass fiber pulltruded
Figure 9: Maximal displacements tubes were used for the model of the grid and
standard elements were used for joining the tubes.
The stresses in the structure remain quite
230 reasonable, so that this type of structure can be very
Maximal Axial Stress in MPa
220 efficient and economic for the construction of
210 shelters for temporary or permanent purposes.
200 However, it is worth reminding that this model of
190
grid shell is still incomplete. Indeed the structure
presented above is geometrically perfect and it is
180
well known that imperfections induce a loose of
170
0 0,5 1 1,5 2 2,5 3
rigidity on that type of structure. Therefore we will
Load Increment / SLS Load have in the future to introduce eccentricities at
connecting nodes and to study the influence of
Figure 10: Maximal axial stresses those imperfections.
Furthermore it was necessary to test the stability of In order to fully demonstrate the structural
the grid shell and it was decided to increase the load efficiency of grid shells and their outstanding
until local buckling appears. Results are presented elegance, a large-scale model (10 m span) has been
below. Figure 9 shows the maximal displacements built in the ENPC and is today still under testing
in cm, figure 10 the maximal axial stresses in MPa (Figure 11).
VOL. 47 (2006) n. 150
Figure 11: Experimental grid shell in the ENPC
7. REFERENCES [9] Day, A. S., An introduction to dynamic
relaxation, Engineer, 219 (1965), p. 218-221.
[1] Limam, O., Nguyen, V.T. and Foret, G.,
Numerical and experimental analysis of two- [10] Barnes, M. R., Applications of dynamic
way slabs strengthened with CFRP strips, relaxation to the design and analysis of cable,
Engineering Structures, 27 (2005), p. 841- membrane, and pneumatic structures, 2nd Int.
845 Conf. on Space Structure, Guilford (1975).
[2] Jülich, A. S., Caron, J.-F. and Baverel, O., [11] Barnes, M. R., Form-finding and Analysis of
Cable structure with load-adapting geometry, Tension Structures by Dynamic Relaxation,
3rd Int. Conf. for Composite in Construction, International Journal of Space Structure, 14
(2005) p. 1103-1110 n°2 (1999).
[3] Baverel, O., Nooshin, H. and Kuroiwa, Y., [12] Adriaenssens, S., Barnes, M. R. and
Configuration processing of nexorades using Williams, C., A new analytical and numerical
genetic algorithms, Journal of the I.A.S.S., 45 basis for the form-finding and analysis of
n°2 (2004). spline and grid-shell struct., in B. Kumar and
B. Topping ed., Computer Developments in
[4] Douthe, C., Baverel, O. and Caron J.-F.,
civil and Structural Engineering (1999)
Propositions for a composite grid shell,
Edinburgh, Civil Comp Press, p.83-90.
Conception and structural analysis, 3rd Int.
Conf. for Composite in Construction, (2005) [13] Han, S.-E. and Lee, K.-S., A study of the
p. 1079-1086 stabilising process of unstable structures by
dynamic relaxation method, Computer and
[5] Weald and Downland grid shell official web
Structure, 81 (2003), p. 1677-1688.
site: http://www.wealddown.co.uk/downland-
gridshell.htm [14] Sab, K., Alaoui, A. and Pradel, F.,
Molecular dynamics for the finite
[6] Hennicke, J., Matsushita, K., Otto, F. et al.,
deformation of random elastic grids,
Gitterschalen Grid shells, Institut für Leichte
Mechanics of Materials (2004).
Flächentragwerke (IL), (1974).
[15] Papadrakakis, M., A method for the
[7] Schek, H. J., The force density method for
automatic evaluation of the dynamic
form-finding and computation of general
relaxation parameters, Computer. Methods in
networks, Computer methods in applied
applied mechanics and engineering, 25
mechanics and engineering, 3 (1974), p. 115-
(1981), p. 35-48.
134.
[16] More about Scilab™ release 3.1 on the
[8] Motro, R. and Maurin, B., The surface stress
official website, http://scilabsoft.inria.fr/
density method as a form-finding tool for
tensile membranes, Engineering Structure,
20 (1998), p. 712-719.
You might also like
- Timber Gridshells - Design Methods and T PDFNo ratings yetTimber Gridshells - Design Methods and T PDF9 pages
- IASS 2011 - Bending Active - Full Paper - LienhardNo ratings yetIASS 2011 - Bending Active - Full Paper - Lienhard7 pages
- The Use of Timber Gridshells For Long Span Structures: 2.1 The Technique and Its AdvantagesNo ratings yetThe Use of Timber Gridshells For Long Span Structures: 2.1 The Technique and Its Advantages6 pages
- Grid Shells-An Overview: Name: Allan Lambor Marbaniang Roll No: 184040016, Phd. Ce 792 AssignmentNo ratings yetGrid Shells-An Overview: Name: Allan Lambor Marbaniang Roll No: 184040016, Phd. Ce 792 Assignment4 pages
- Design of Large Structures: 1. Tall BuildingsNo ratings yetDesign of Large Structures: 1. Tall Buildings22 pages
- Preliminary Design and Analysis Sandwich FRP Bridge DeckNo ratings yetPreliminary Design and Analysis Sandwich FRP Bridge Deck6 pages
- The Savill Garden Gridshell Design and ConstructionNo ratings yetThe Savill Garden Gridshell Design and Construction7 pages
- Analytical Tools For Shell Structures-04No ratings yetAnalytical Tools For Shell Structures-0411 pages
- Particle-Spring Systems For Structural Form FindingNo ratings yetParticle-Spring Systems For Structural Form Finding9 pages
- Construction Material Selection Criteria For Timber Gridshell ApplicationNo ratings yetConstruction Material Selection Criteria For Timber Gridshell Application10 pages
- Large Span Structures:Flat Plate Construction.100% (12)Large Span Structures:Flat Plate Construction.20 pages
- Leichtbau Skript Kroeger Kapitel 4 3 Teil2 FormleichtbauNo ratings yetLeichtbau Skript Kroeger Kapitel 4 3 Teil2 Formleichtbau7 pages
- Literature Study: Steel Lattice StructureNo ratings yetLiterature Study: Steel Lattice Structure5 pages
- Maqueta Concretefoldedplatesin The NetherlandsNo ratings yetMaqueta Concretefoldedplatesin The Netherlands21 pages
- Domes: 1. SIRI - 10091AA008 2.LOUKYA-10091AA026 3.MANISHA-10091AA034No ratings yetDomes: 1. SIRI - 10091AA008 2.LOUKYA-10091AA026 3.MANISHA-10091AA03444 pages
- Tectonic Design of Elastic Timber Gridshells: Jorge G. Fernandes, Poul H. Kirkegaard, Jorge M. BrancoNo ratings yetTectonic Design of Elastic Timber Gridshells: Jorge G. Fernandes, Poul H. Kirkegaard, Jorge M. Branco10 pages
- Form Finding of Shells by Structural OptimizationNo ratings yetForm Finding of Shells by Structural Optimization9 pages
- Form Finding of Shells by Structural OptimizationNo ratings yetForm Finding of Shells by Structural Optimization9 pages
- Conceptual Design and Analysis of Long Span StructureNo ratings yetConceptual Design and Analysis of Long Span Structure13 pages
- Du Ine Izvijanja Elemenata Ispune Prema en 1993-3-1 Prilog H 1415881213960No ratings yetDu Ine Izvijanja Elemenata Ispune Prema en 1993-3-1 Prilog H 141588121396011 pages
- Introduction To Inventory Management: CTL - SC1x - Supply Chain & Logistics FundamentalsNo ratings yetIntroduction To Inventory Management: CTL - SC1x - Supply Chain & Logistics Fundamentals14 pages
- Elastic vs Plastic Theories in Metal StructuresNo ratings yetElastic vs Plastic Theories in Metal Structures8 pages
- Python Basics: Variables, Strings, Lists, and MoreNo ratings yetPython Basics: Variables, Strings, Lists, and More65 pages
- Design of The Cross Flow Runner: ConstantsNo ratings yetDesign of The Cross Flow Runner: Constants8 pages
- Probability and Probability Distributions: Dr. Kassa Daka (MSC, PHD)No ratings yetProbability and Probability Distributions: Dr. Kassa Daka (MSC, PHD)65 pages
- Zhu Joe - Quantitative Models For Performance Evaluation and Benchmarking. Data Envelopment Analysis With Spreadsheets - 2008 PDFNo ratings yetZhu Joe - Quantitative Models For Performance Evaluation and Benchmarking. Data Envelopment Analysis With Spreadsheets - 2008 PDF274 pages
- Regression Model For Appraisal of Real Estate Using Recurrent Neural Network and Boosting TreeNo ratings yetRegression Model For Appraisal of Real Estate Using Recurrent Neural Network and Boosting Tree5 pages